Futaba RC Technology - S.BUS system -
S.BUS system
S.BUS
従来からの一般的な受信機とサーボの接続方法は、機体/車体に搭載した各サーボの役割(エルロン、スロットル等)に応じて、指定された受信機の出力チャンネルにサーボを接続しています。この方式ではサーボの数が増えると配線の数も増えて行くため、受信機のチャンネル出力周辺の配線が混み入ってしまい整理が困難になることや、受信機のサイズが大きくならざるを得なくなります。
これらの不都合を解消するために生まれたのが"S.BUS System"です。
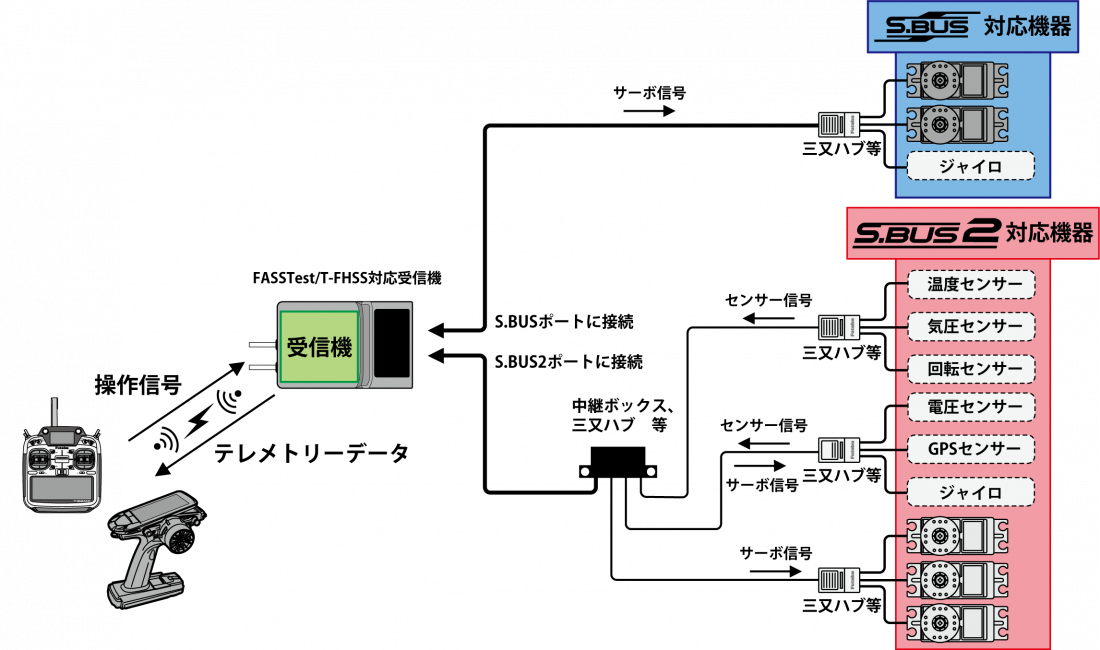
S.BUS systemでは、全サーボに全chの制御データを供給します。個々のサーボには受け取った全chの制御データのうち、どのchデータに従って動作させるのかを予めプログラムしておきます。
こうすることにより、受信機からは一本の信号線を接続するだけですべてのサーボに制御信号を送ることができるようになり、複数のサーボは専用のハブや中継ボックスで信号を分配し接続していきます。
S.BUS2
S.BUS は受信機からサーボに制御データを送るためのシステムですが、S.BUS2はサーボの制御の他に、その信号線に接続したセンサーのデータを受信機に送り返すためのシステムです。
これにより、FASSTest/T-FHSS等の双方向通信機能を装備したプロポと組合せることにより、機体/車体のバッテリー電圧、モーター回転数、温度などの情報をプロポ側でモニターすることができます。
なお、S.BUS2の系統にはS.BUS2対応機器以外(S.BUSサーボ含む)を混ぜて接続すると、S.BUS2機器が正常動作できなくなります。
従って、S.BUS2の系統には、S.BUS2対応機器のみを接続してください。
※S.BUS/S.BUS2は、ホビーラジコン機器以外に一部のドローンや産業機器でも利用されています。
※S.BUS/S.BUS2のロゴ表示の無い機器は、通信に支障が出る恐れがあるので接続しないようにしてください。
※S.BUSならびにS.BUS2、およびそれらのロゴは双葉電子工業株式会社の登録商標です。