Futaba RC Technology - AVCS -
AVCS
【ヘリ用】
AVCSはAngular Velocity Control System(角速度コントロールシステム)の略です。
例えばヘリのラダーに用いた場合、その名の通りラダースティックをニュートラルから倒した量に比例して、機体のヨー方向に回るスピードをコントロールすることができます。したがって、スティックがニュートラルになっているときは機体はヨー軸方向に回転せず止まっていますので、自動的にトリム調整をしていることになります。
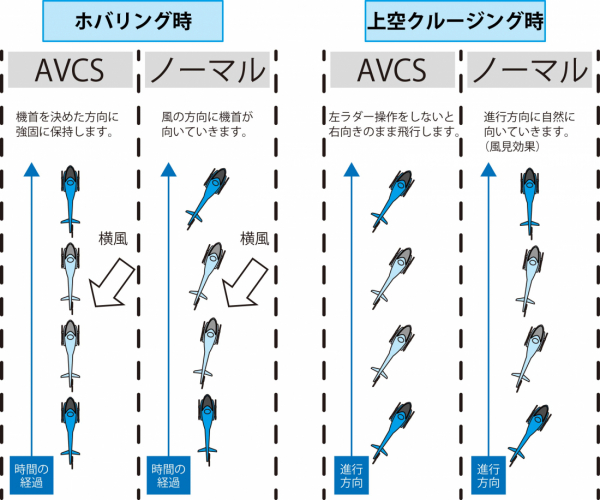
ヘリがホバリングで静止している状態から、ラダースティックをニュートラルから少し倒すとゆっくりとピルエットが始まります。そのままスティックを少し倒した状態を維持している間は低速ピルエットを継続し、 スティックをエンドポイントまで倒すと高速ピルエットとなります。その時のピルエットの最大速度はジャイロで設定が可能です。
またAVCSモードの最大の特徴として、機体の向きを覚えておくことができるということです。これは機体の細かな挙動をすべて積算していくことで、どの方向にどれだけ動いたのかを記憶しているからです。この演算をすることで、仮に横風などで機体の向きが変わってしまおうとしても、AVCSがその時点であるべき機体の向きを覚えていますので補正することができます。
AVCS方式はマニアの間ではしばしば「ヘッドロック」とも言われていますが、これはスティックを操作しない限り機体は原則的には回転(ピルエット)しないからです。さらに、現在の主流であるフライバーレスヘリは、3軸(ロール、ピッチ、ヨー)に対してAVCS制御を行うことでこそ、安定した飛行とソリッドな演技が可能となっています。
その一方で、AVCSではない通常のレートジャイロモードでは、機体が風などの外乱を受けた場合に外乱を受ける直前の状態を保とうとする(=補正)動作となります。ただ、この補正は連続で行われるわけではなく一定の周期(例えば0.01秒ごと)に行われていることと、一度補正処理が終わるとその時に得た補正データはAVCSモードとは違って記憶されずに次の補正処理になるため、 補正と補正の間で生じた機体の挙動は無視されてしまうのでスティック操作とは意図しない機体の挙動が発生することになります。
したがって、例えば横風を受けるとそのまま何もしないと機体の向きがズレていきますので、通常のモードでは横風のような外乱の状況を把握しながら飛行させるテクニックがAVCSモードよりも必要です。
AVCS方式を実現するためには、機体の挙動を検出するセンサーの性能の進歩と深く結びついています。
このセンサーは正式には「レートジャイロセンサー」と呼びますが、これで機体の角速度(=回転速度)を検出しています。
通常のレートジャイロの制御では、先述のとおり検出した角速度を補正したデータは捨てられていましたが、AVCSは補正状態を積算していくことでどの方向にどれだけ動いたのかを演算できるようになりました。
この積算をするためには、センサー素子自身の安定度が肝となります。特に温度に対してセンサーが不安定な場合、機体の挙動とセンシングしたデータが一致せず正確な姿勢制御ができなくなります。
以前はセラミック製のセンサーが主流でしたが、温度ドリフトのばらつきが比較的大きくAVCS方式の開発が困難でしたが、その後MEMS技術をベースとしたセンサーが実用化されたことで、 温度特性や角速度検出精度を高めたセンサーが出現しAVCS方式のジャイロが誕生しました。
【固定翼飛行機用】
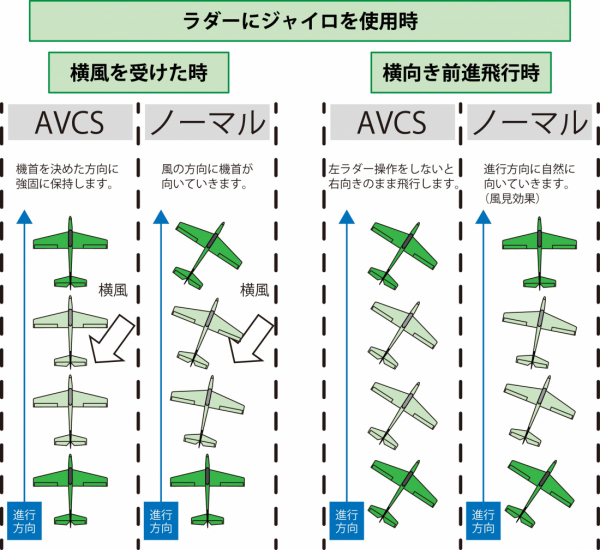
次に固定翼飛行機の場合ですが、ノーマルモードまたはジャイロなしの状態ですと3軸ともにいったん水平・直進安定飛行になるように調整しても横風や乱気流の影響ですぐに姿勢が変化してしまいますが、 AVCSモードで制御するとヘリの部分でも説明しましたが、このモードでは機体の回転を止めてくれます。言い換えると、トリムをジャイロが勝手に調整してくれますので、機体のクセを見かけ上取り去ることができます。
したがって、例えばナイフエッジを行う際に十分な機速が確保されていれば、AVCS制御を入れることでノーマルモードよりも長くきれいな安定姿勢を保った演技ができるようになります。
その一方で、横風を受けても進行方向を維持しようとしますので、水平飛行時の風見鶏効果は打ち消されてしまうためラダー操作で修正する必要があり、 ベテランのパイロットにとっては最初は違和感を抱くかも知れませんし、初中級者に至っては補正舵を打つことが難しくなります。したがって、ラダーはノーマルモードの使用を推奨しています。
また、着陸時は機速を落としている状態でエレベータ制御が効きすぎると急激に失速することがありますのでノーマルモードのほうが安全です。
このようにAVCSモードとノーマルモードはそれぞれに長所・短所がありますので、GYA553には「保持力」という調整項目が有り、AVCSモードでの動作を保持力は確保しつつノーマルモードに近い操作感覚にさせることも出来ます。
【カー用】
最後にカー用ジャイロのAVCSモード動作について説明します。
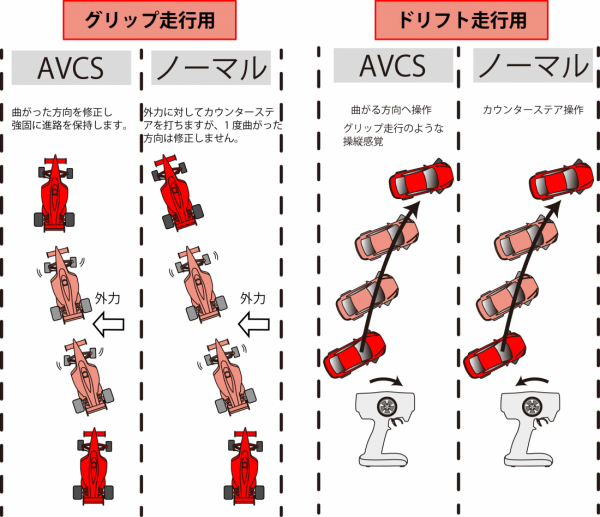
グリップカー、特にF1などの後輪駆動の場合、スロットル操作を誤るとすぐに後輪側が滑ってしまい車体の向きが変わってしまいます。最悪の場合はスピンに至ります。
この際、ノーマルモードの場合はスピンまでは至らなくともいったん車体の向きが変わってしまったらその向きになったままです。
一方、AVCSモードでは、どの方向にどのくらい車体の向きが変わってしまったのかを計算していますので、ステアリングを切っていなければ車体は元の向きを保とうとします。
またドリフト用の場合は、ノーマルモードではドリフト中はカウンターステアを打つ操作となりますが、AVCSモードの場合はグリップカー用のチューニングとは全く異なる処理を加えることで、 あくまでも進行方向にステアリングを当てていく操作でドリフトが行えるセッティングとしていますので、グリップ走行と同じ感覚の操作となります。